































































.png)












.jpg)







































































.png)





























































































































.png)








.png)





























.png)





















































.png)











.jpg)





The task of Locating underground utilities can be bifurcated into two deliverables:
1. Detection of underground utilities
2. Mapping of underground utilities
If we take a this can be further subdivided into:
a. Detection of metallic cables & pipes, whether energized current carrying utilities or non energized utilities such as signaling cables, metallic pipes etc.
b. Detection of DI pipes, metallic manholes etc.
c. Non-metallic HDPE telecom pipes, fiberglass manholes, etc. Underground cable & pipe utility locating requires the use a combination of various equipments and techniques which need to be chosen based on desired deliverables and then correctly employed to obtain the desired results.
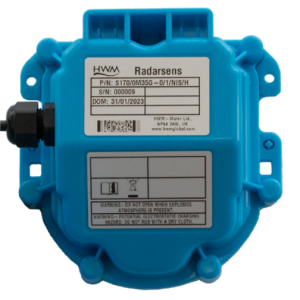
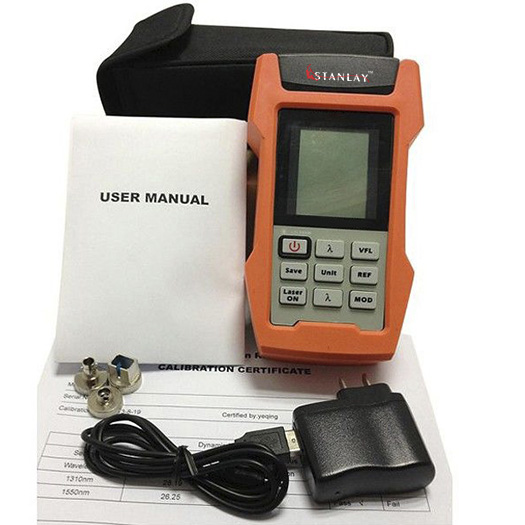
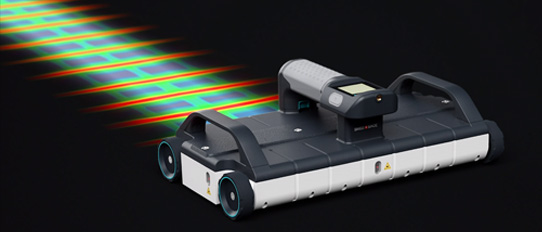
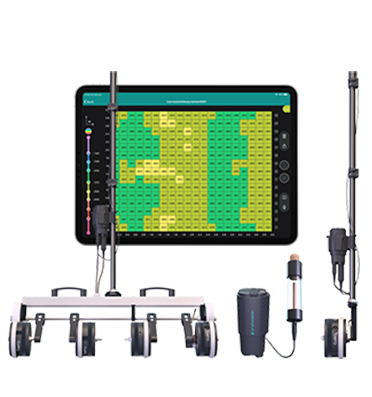
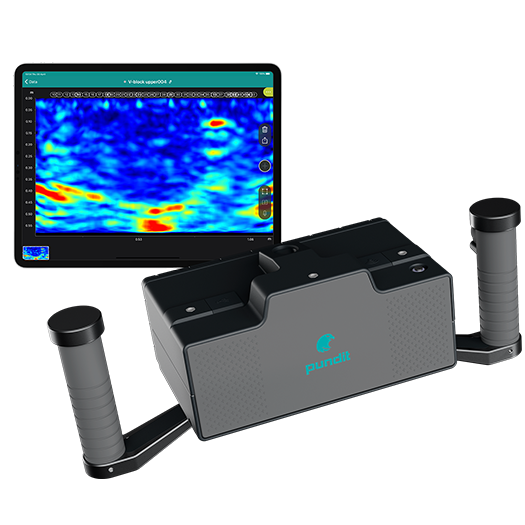
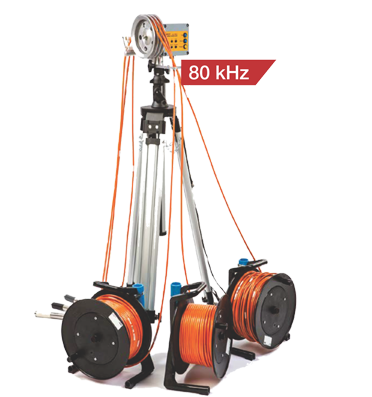
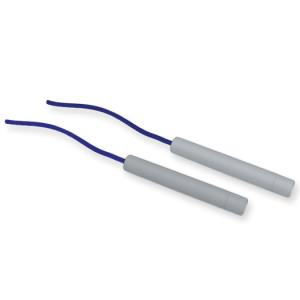
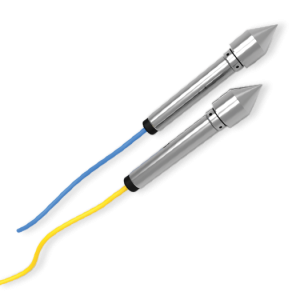
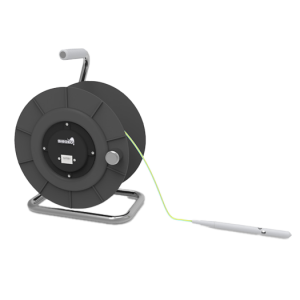
If the answer is a , an operator with basic training on usage of the ever dependable CSCOPE DXL2 Cable avoidance tool or CAT33XD Cable avoidance tool, can do the job blindfolded. If the answer is b, an additional metal detector &/or magnetic locator is required. If the answer is c. The use of a ground penetrating radar or GPR is necessary. In layman term, Fundamentally, both a and B operate on the principle of detecting electromagnetic energy (based on specified frequencies) . In case of CSCOPE Pipe & Cable locator standard features include capability to detect both 50Hz passive power signal frequency and the capability to transmit an electromagnetic energy (at a specified frequency) and in turn detection of a small amount of frequency. The time delay allows detection of range of the target. Whereas. In case of a ground penetrating radar, The GPR transmits a very short pulse of e.m. energy into the material by a transmitting antenna at a wide range of higher frequencies in comparison to a pipe & cable locator . Energy reflected by discontinuities is captured by a receiving antenna. Depth range & resolution are related to the radar frequency, transmitted power, host material e.m. properties and to the shape and characteristics of the targets. The above combined with specialised electronic controllers allow Differences in dielectric properties between two adjacent materials through which the radar wave propagates to be captured allowing detection of both metallic and non metallic utilities. The basic GPR allow detection of both metallic and non metallic utilities, On Site, by capturing the images of the scans , which display parabolas based on the differences in dielectric properties. Combining basic surveying techniques with the on site detection GPR allows generation of data of presence of such buried metallic pipes & cables. In addition, on account of the principle , the GPR can scan through utilities to even detect layers of utiltiies below the first layer of utilities, which may not be possible with a cable & pipe locator if the utilities are too closely bunched. The basic software in on site detection GPR, such as the Detector DUO from IDS Italy also combine a basic GRED software allowing the operator to mark on site , the kind of utility (to be decided by the operator based on visual observation, use of CSCOPE cable avoidance tool / digital pipe & cable locator and logical deduction). If however, the call is for b i.e mapping of underground utilities, utilization of multifrequency multi array configuration GPR or ground penetrating radars such as the RIS HIMOD with advanced digital controllers providing fast sampling ratesto carry out high resolution capture, collation and processing of underground utility data over large areas Combining with advanced GRED 3D software allows post processing of the acquired data with minimal human intervention to build detailed maps of the underground utilities which can be exported to CAD. Such maps then become the foundation of work for utilities, municipalities, project teams and supervisors.